

A – Humanoid Robots Group (NAO-CSE-SBU):
Titles of some BSC Projects:
– Omnidirectional walking for the NAO humanoid robot
– Low power walking for the NAO humanoid robot
– Closed-domain conversations (Persian/Farsi) for the NAO humanoid robot (Voice command, Text to speech, Speech to text, …)
– Artificial vision in the Nao humanoid robot
– Behavior design of NAO humanoid robot – Playing Tic Tac Toe Game

We are always looking for enthusiastic students to join our group.
If you are interested, please contact directly at y_shekofteh@sbu.ac.ir


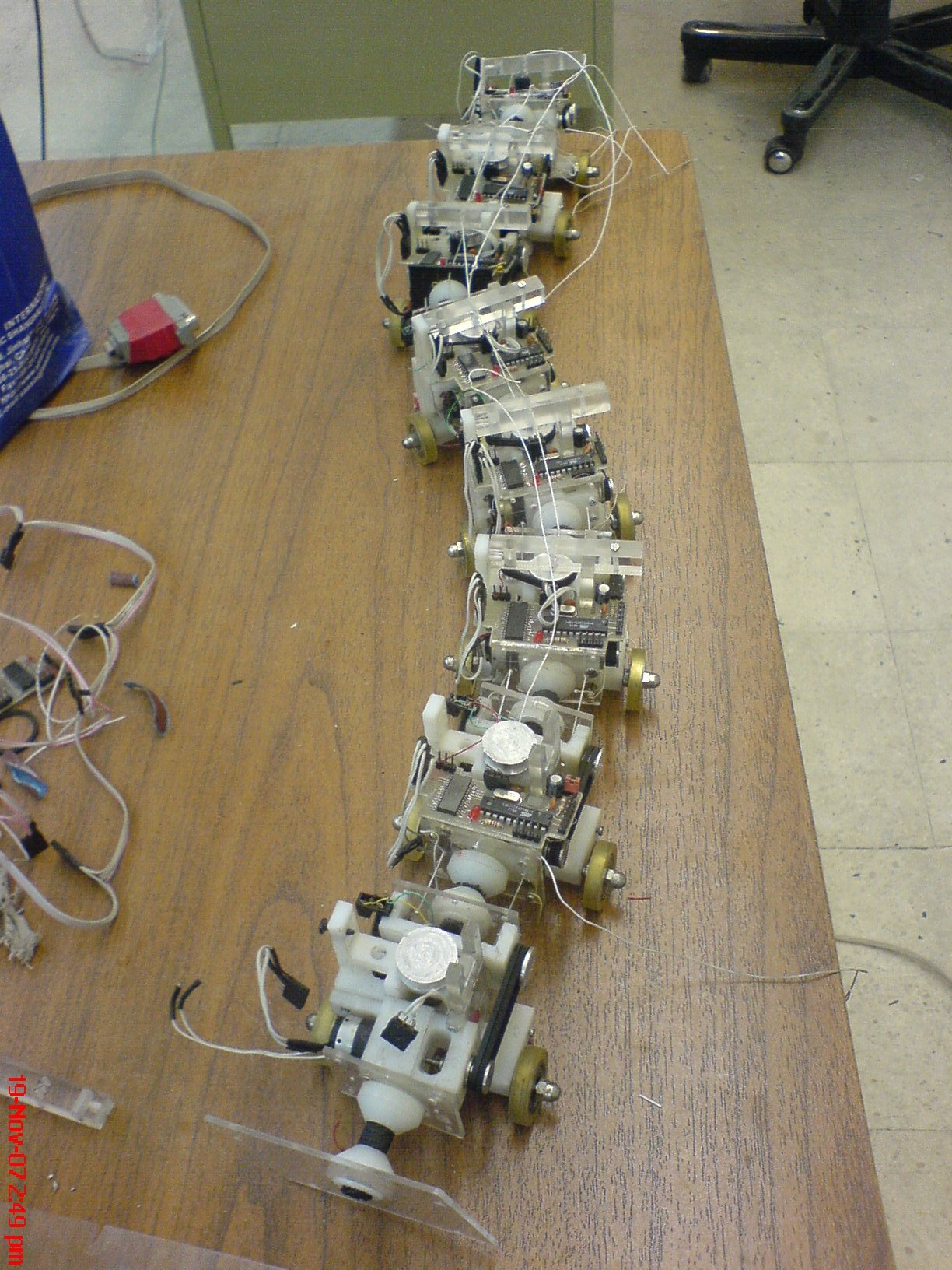
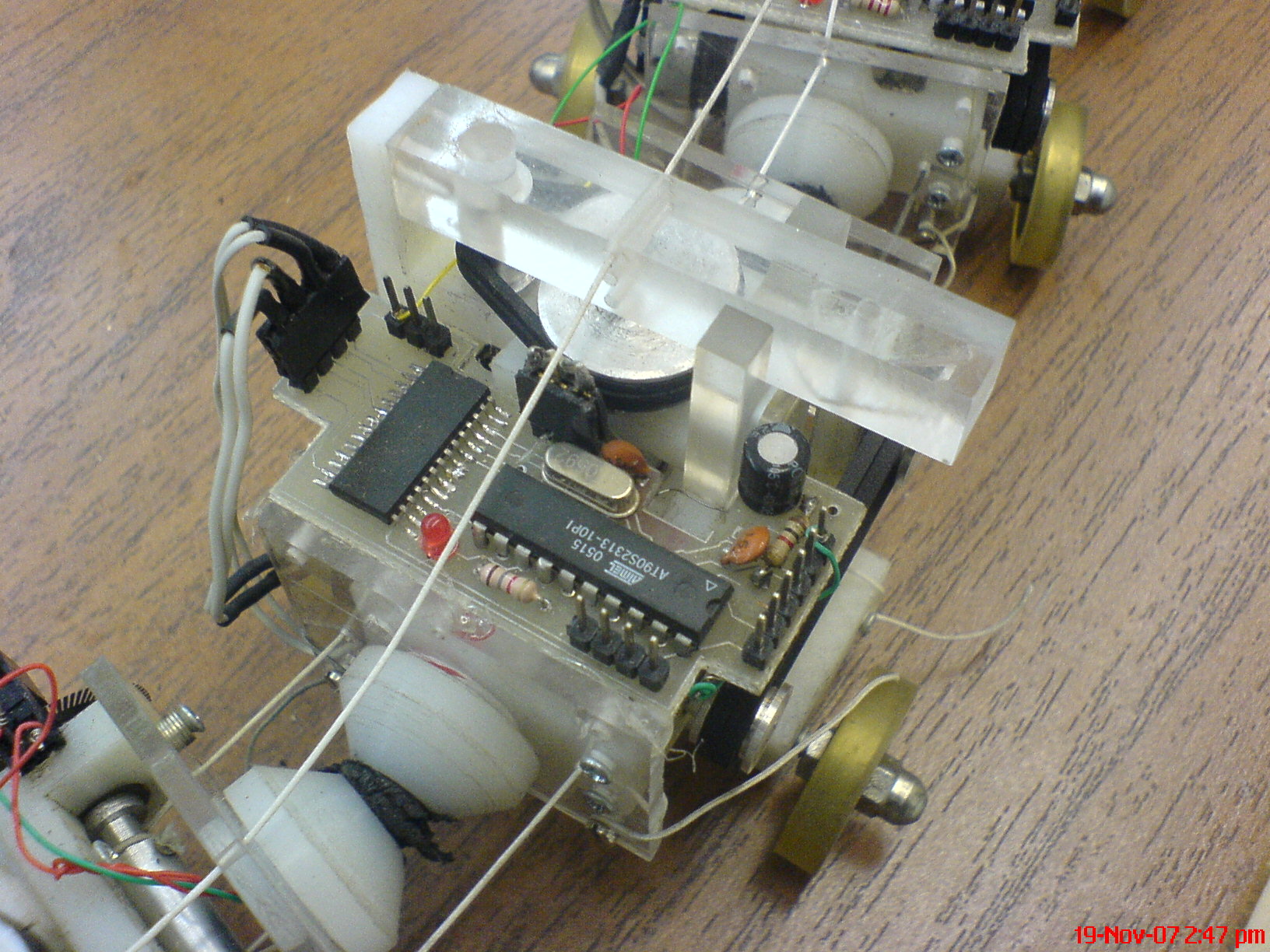
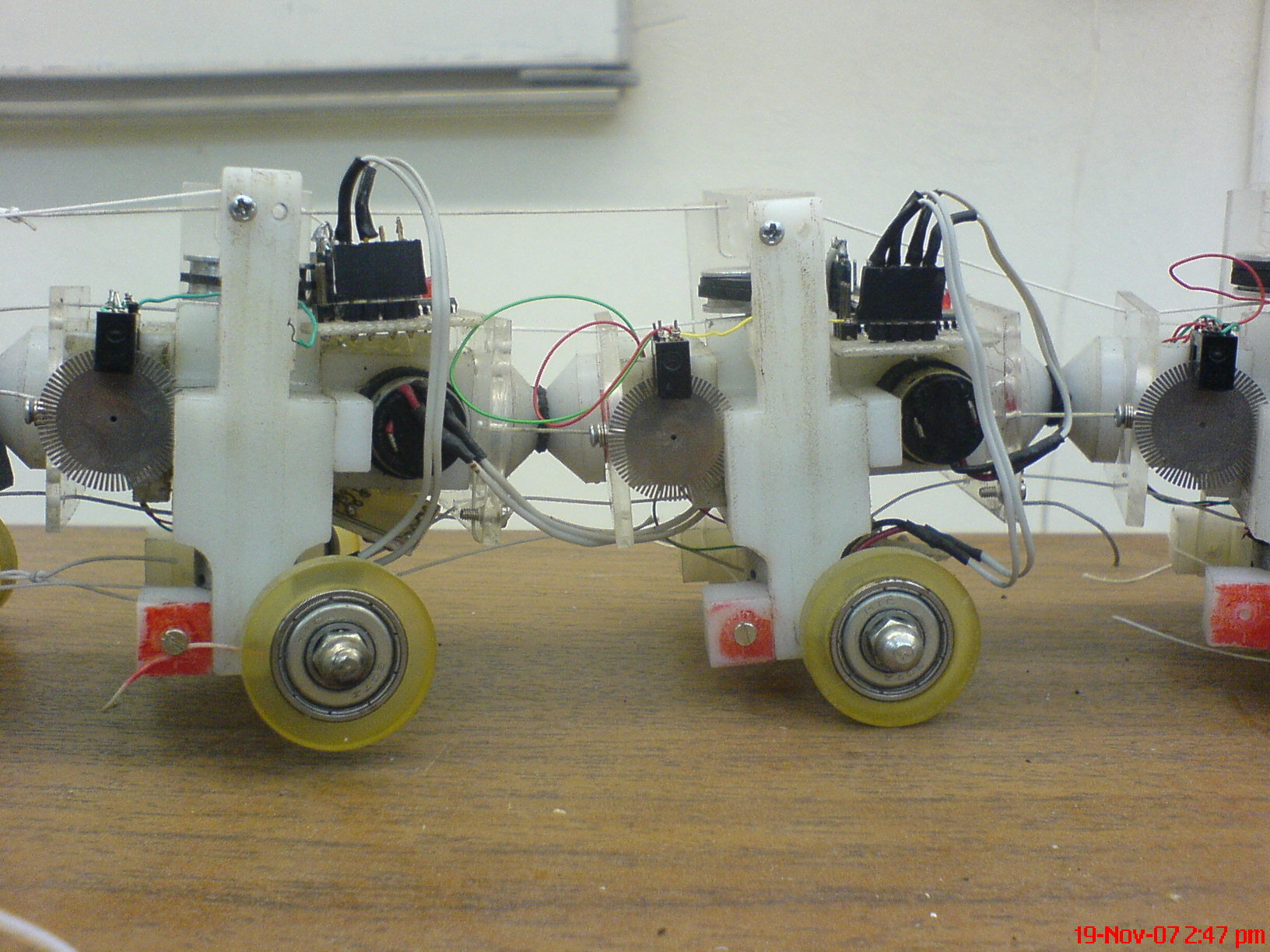
B – Snake Robot (BME-AUT):
Design and control of a snake robot according to snake anatomy
Serpentine robots are multi-segmented vehicles. Based on their physical structure and design, these robots could have great mobility in their movements. This mobility can enable the robot to move around in more complex environments. The application of these kind of robots could be very useful in hard to reach places or hazardous environments.
Recent Comments